#include <Stepper.h> // เรียกใช้ ไฟล์ Stepper.h
#define STEPS 32 //กำหนดตัวเเปรSTEPS 32
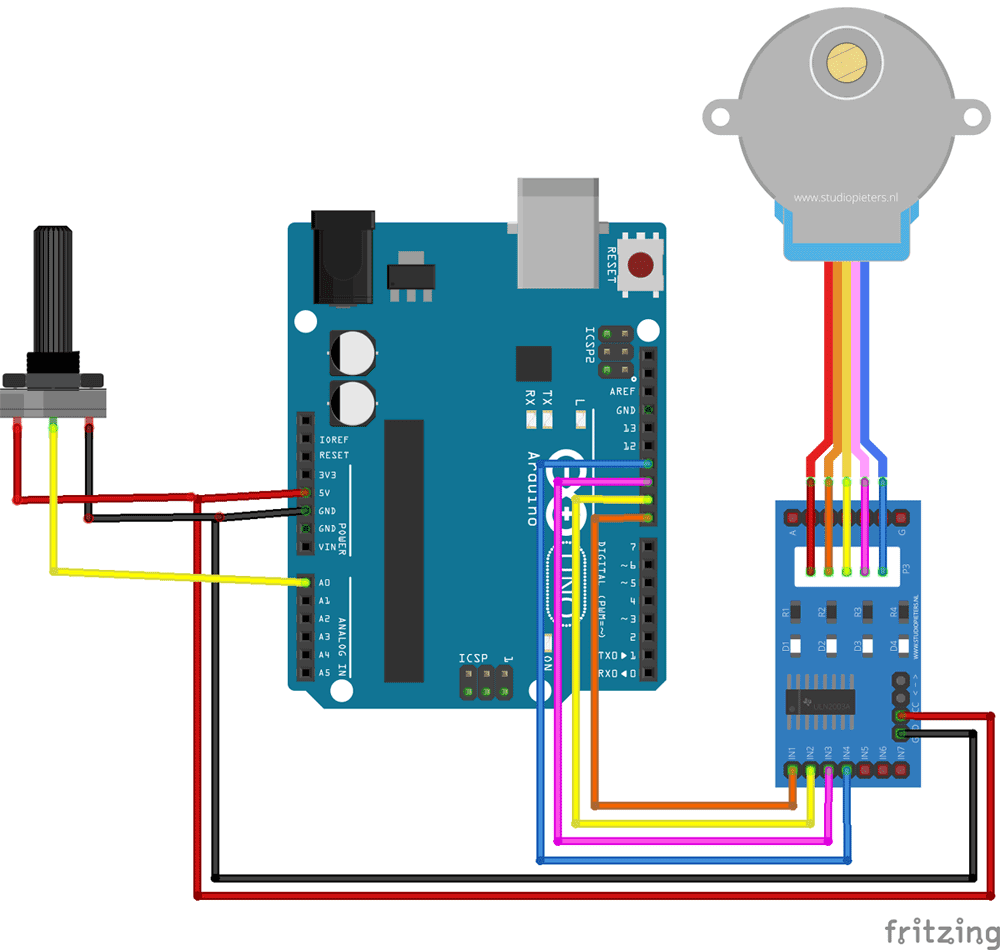
Stepper stepper(STEPS, 8, 10, 9, 11); //กำหนดขา 8, 10, 9, 11 เชื่อมต่อกับ motor
int Pval = 0; // กำหนดตัวเเปร Pval = 0
int potVal = 0; // กำหนดตัวเเปร potVal = 0void setup() {
Serial.begin(9600); // ตั้งค่าการรับส่งข้อมูลมีความเร็วเท่ากับ 9600 บิตต่อวินาที
stepper.setSpeed(200); //ตั้งค่าสปีด motor มีค่าเท่ากับ 200
}
void loop() {
potVal = map(analogRead(A0),0,1024,0,500);
//ค่าของตัวเเปร potVal รับค่า จากขาA0 ที่ ทำการปรับค่า 0-1024 กับ 0-500 ให้สมดุลกัน
if (potVal>Pval) //ถ้า ค่าตัวเเปร potVal มากกว่า Pval
stepper.step(5); //.ให้ motor หมุนซ้าย 5 step
if (potVal<Pval) //ถ้า ค่าตัวเเปร potVal น้อยกว่า Pval
stepper.step(-5); //.ให้ motor หมุนขวา 5 step
Pval = potVal; // ถ้า ค่าตัวเเปร potVal เท่ากับ Pval
Serial.println(Pval); //ส่งข้อมูล Pval เเล้วขึ้นบรรทัดใหม่
}



ไม่มีความคิดเห็น:
แสดงความคิดเห็น